Technische Daten drive-tron-Frequenzumrichter Gen. 4
Geräteklassen
|
Motor-Leistung |
Platine [lxbxh] |
Wand-Gehäuse [lxbxh] |
|
|
FU0 smart-version single board 1x230VAC/320VDC |
bis 2,2kW |
200x120x66 |
220x70-105x130 |
|
FU1 single board 1x230VAC/320VDC, 3x400VAC/565VDC |
bis 4kW |
213x165x68 |
270x176x75-110 |
|
FU2 single board 1x230VAC/320VDC, 3x400VAC/565VDC |
bis 11kW |
270x200x63 |
360x205x120 |
|
FU3 single board 3x400VAC/565VDC |
bis 22kW |
330x260x63 |
420x303x170 |
|
FU4 modular 3x400VAC/565VDC |
ab 22kW |
213x100x22 |
leistungsabhängig |
Spezielle Layoutformen oder erweiterte Spannungsbereiche sowie modularer Aufbau in kleineren Leistungsgrößen auf Anfrage.
Funktionsumfang
|
FU0 |
FU1 |
FU2 |
FU3 |
FU4 |
|
|
"STO" (Safe Torque Off / Sicherer Halt) nach DIN |
✓ |
✓ |
✓ |
✓ |
✓ |
|
interne Versorgunsspannung 5 oder 24V, oder extern 3-24V |
✓ |
✓ |
✓ |
✓ |
✓ |
|
vielfältig programmierbare Digitalausgänge |
4 |
4 |
4 |
4 |
4 |
|
weitere festgelegte Digitalausgänge |
- |
2 |
2 |
2 |
2 |
|
Alle wichtigen Logikfunktionen auf Klemme |
✓ |
✓+ |
✓+ |
✓+ |
✓+ |
|
USB onboard |
✓ |
✓ |
✓ |
✓ |
✓ |
|
CAN onboard |
✓ |
✓ |
✓ |
✓ |
✓ |
|
LAN onboard |
- |
(o) |
(o) |
(o) |
(o) |
|
automatisch optimal angepasste Taktfrequenzen |
✓ |
✓ |
✓ |
✓ |
✓ |
|
standardmäßig mindestens 2kHz Drehfeldfrequenz |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Synchron und Asynchronbetrieb |
✓ |
✓ |
✓ |
✓ |
✓ |
|
für Hochfrequenz- und Spindelantriebe geeignet |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Anlaufboost |
✓ |
✓ |
✓ |
✓ |
✓ |
|
sensorless vector control |
✓ |
✓ |
✓ |
✓ |
✓ |
|
automatische feldorientierte Spannungszuordnung |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Leistungsgrenze standardmäßig bis 150% einstellbar, standardmäßig spitzenbelastbar bis 200% |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Parametersätze |
8/16 |
8/16 |
8/16 |
8/16 |
8/16 |
|
Drehzahl, Beschleunigung und Stromgrenze über Analog- oder Digitaleingänge vorgebbar |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Analoge und digitale Istdrehzahl und Strombelastungsausgänge |
(o) |
(o) |
✓ |
✓ |
✓ |
|
Brems-Chopper |
(o) |
(o) |
(o) |
(o) |
(o) |
|
standardmäßig Motortemperaturauswertung über z.B. |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Drehzahl-/ Drehwinkelrückführung mit Hall-Sensor |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Drehzahl-/ Drehwinkelrückführung mit Quad-Encoder* |
✓ |
✓ |
✓ |
✓ |
✓ |
|
Drehzahl-/ Drehwinkelrückführung mit Resolver* |
- |
(o) |
(o) |
(o) |
(o) |
+ = erweiterte Analog- und Digital- Ein- und Ausgänge sowie kundenspezifische Funktionen
o = optional
* = in Kürze verfügbar
Auf Anfrage sind Funktionsanpassungen möglich.
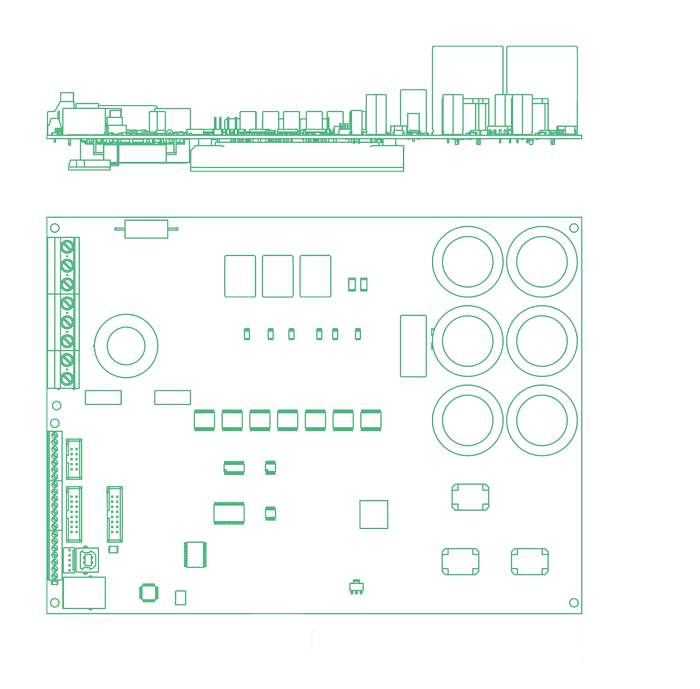
Platinenmaße
|
|
l |
b |
h1 |
h2 |
|
FU0 |
200 |
120 |
66 |
10 |
|
FU1 |
213 |
165 |
68 |
12 |
|
FU2 |
270 |
200 |
63 |
17 |
|
FU3 |
330 |
260 |
63 |
17 |
|
FU4 |
213 |
100 |
22 |
- |
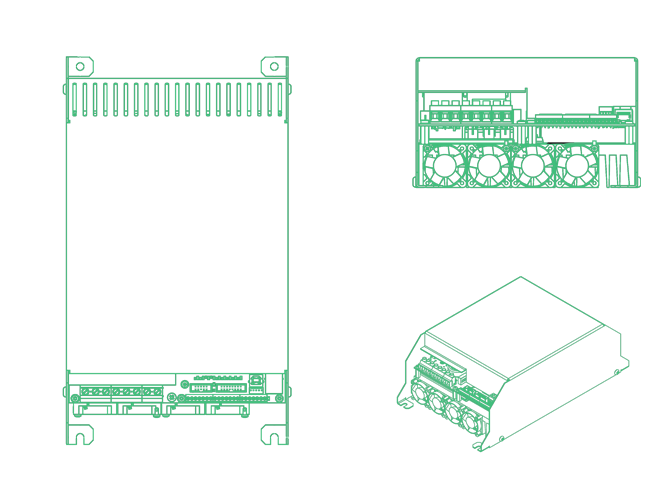
Maße und Befestigungslöcher Wandgehäuse
|
|
l1 |
l2 |
b1 |
b2 |
h |
|
FU0 |
220 |
208 |
70-105 |
38-73 |
130 |
|
FU1 |
270 |
255 |
176 |
150 |
75-110 |
|
FU2 |
360 |
343 |
205 |
180 |
120 |
|
FU3 |
420 |
402 |
303 |
277 |
170 |
|
FU4 |
leistungsabhängig |
||||
Wir konstruieren Ihnen gerne bei Bedarf Gehäuse in speziellen Größen, Formen und Eigenschaften.
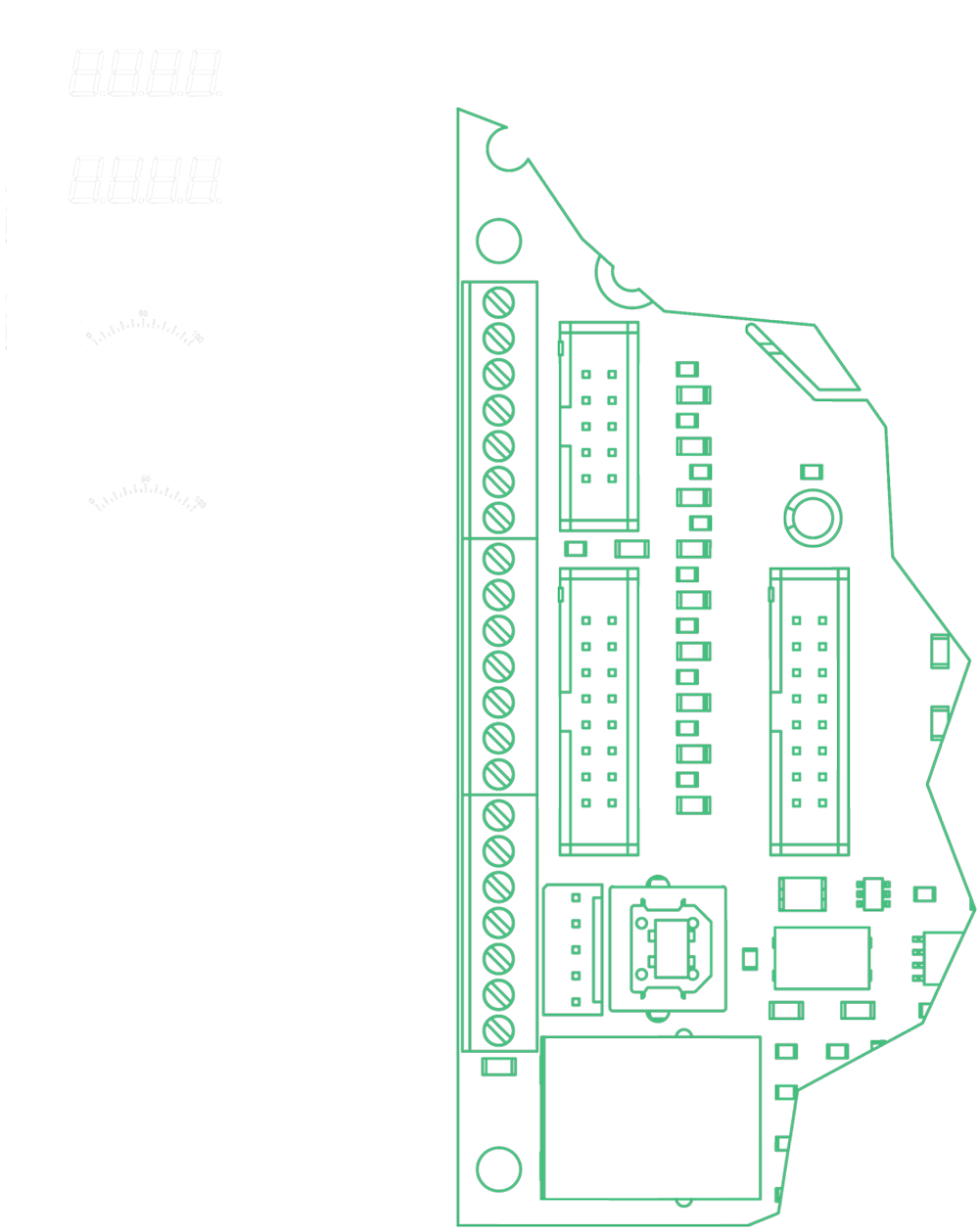
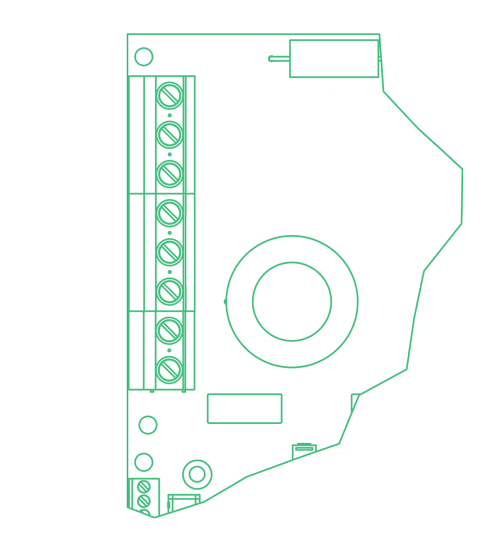
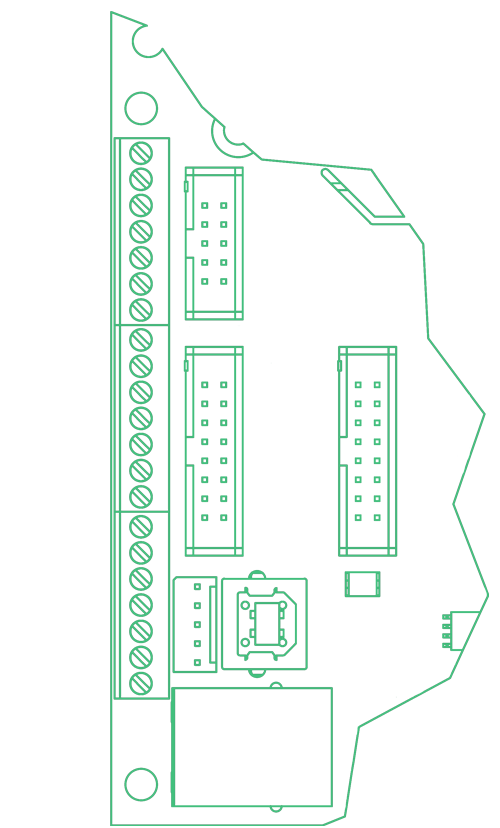
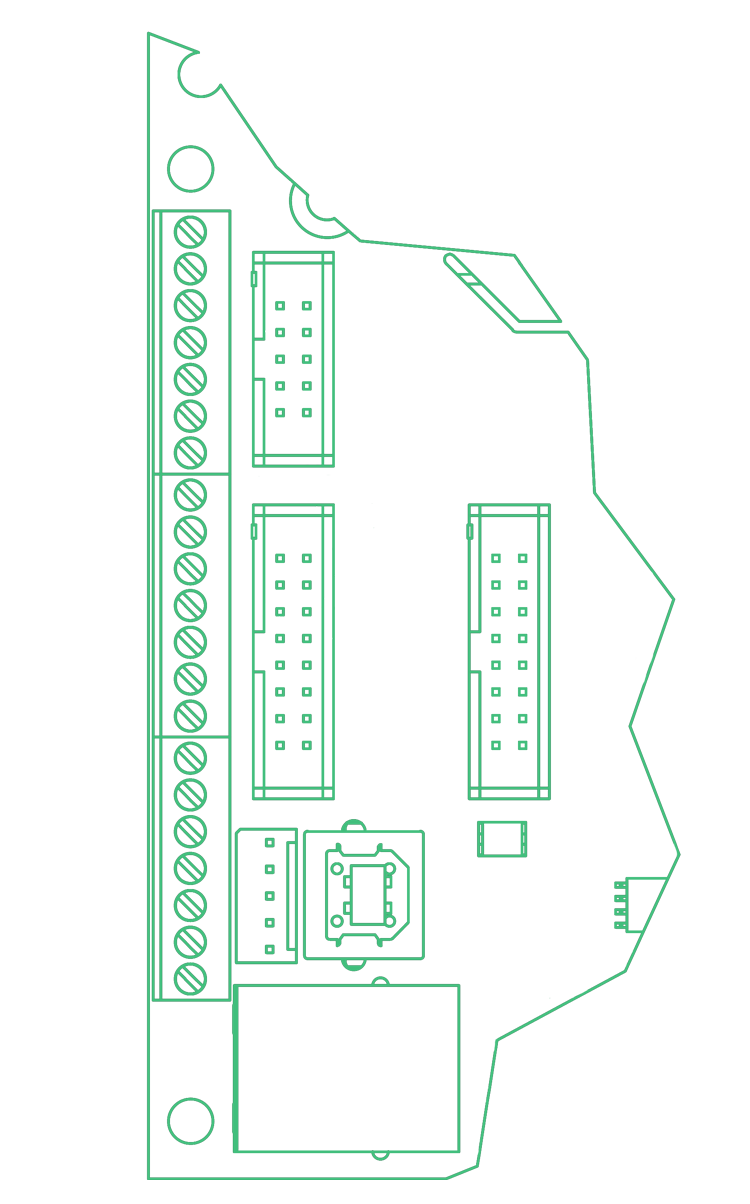
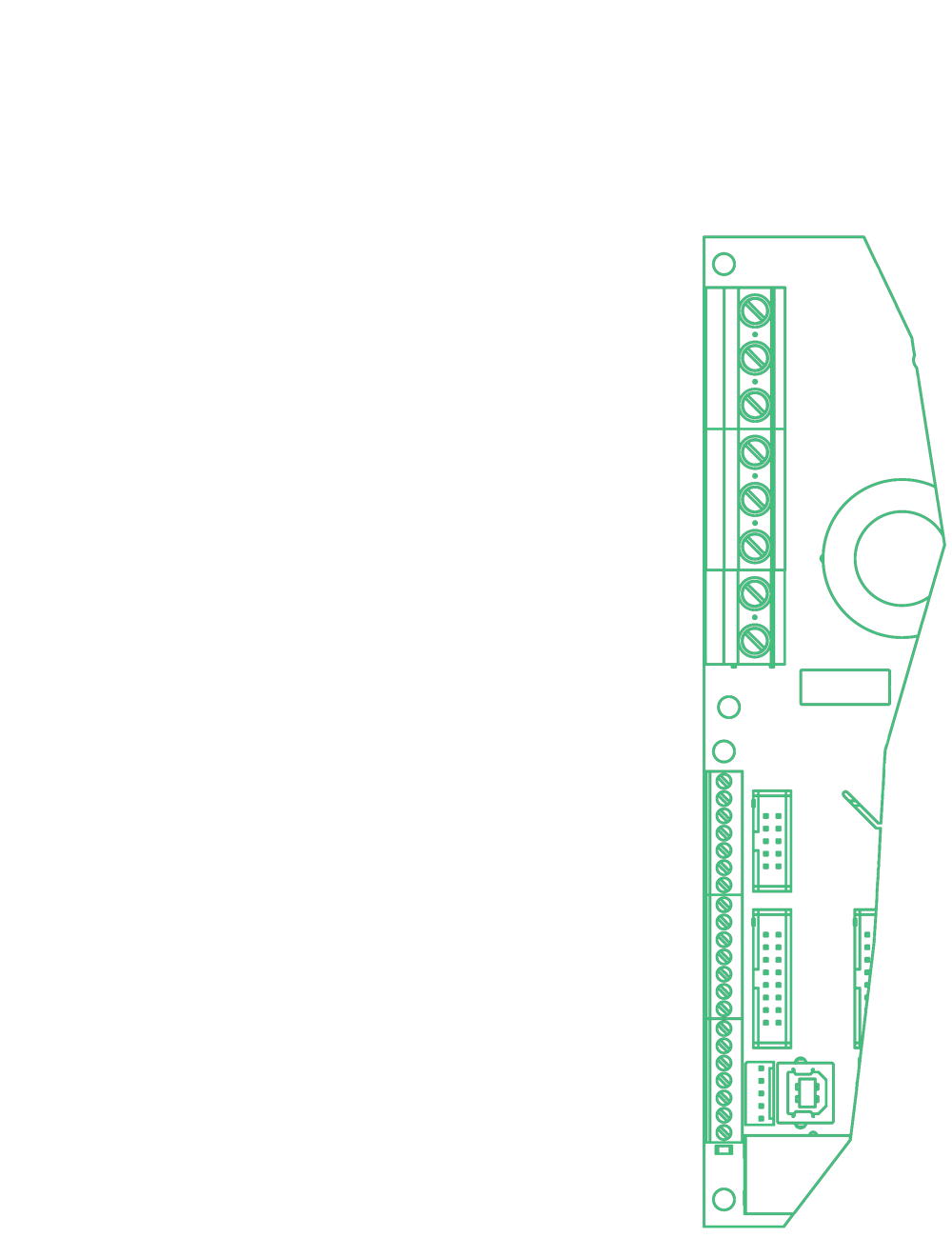
Klemmbezeichnungen und Funktionen
Leistungsanschlüsse
|
NR. |
BEZ. |
FUNKTION |
EIGENSCHAFTEN |
|
KL1 |
L1 |
Netzeingang Phase 1 |
400VAC +/- 10%, 50-60Hz |
|
KL2 |
L2 |
Netzeingang Phase 2 |
400VAC +/- 10%, 50-60Hz |
|
KL3 |
L3 |
Netzeingang Phase 3 |
400VAC +/- 10%, 50-60Hz |
|
KL4 |
M-U |
Motorausgang Phase U |
variable Pulsweitenmodulation |
|
KL5 |
M-V |
Motorausgang Phase V |
variable Pulsweitenmodulation |
|
KL6 |
M-W |
Motorausgang Phase W |
variable Pulsweitenmodulation |
|
KL7 |
CP+ |
Chopperausgang + |
Bremsenergierückführung |
|
KL8 |
CP- |
Chopperausgang - |
Bremsenergierückführung |
|
KL9 |
PERC |
EMV-Masse Leistungs-Endstufe |
PE-Potential |
|
KL10 |
PE0V |
EMV-Masse Steuerspannung |
PE-Potential |
Steueranschlüsse
|
NR. |
BEZ. |
FUNKTION |
EIGENSCHAFTEN |
|
KL11 |
0VDC |
Bezugsspannung |
0VDC |
|
KL12 |
S1 |
Analog-Drehzahlvorgabe |
0-5VDC, Sonderskalierung möglich |
|
KL13* |
S2 |
Analog-Beschleunigungsvorgabe |
0-5VDC, Sonderskalierung möglich |
|
KL14* |
S3 |
Analog-Motorstrombegrenzung |
0-5VDC, Sonderskalierung möglich |
|
KL15 |
S4 |
Analog-Motortemperatur |
PT, PTC, KTY, lineare Spannung |
|
KL16 |
S5 |
Analog-Sonderfunktionen |
z.B. analoge Parametersatz-Auswahl |
|
KL17 |
5VDC |
interne Steuerspannung |
Ersatz nicht verfügbarer ext. Steuerspannung |
|
KL21 |
EIN-LI |
Drehrichtung links ein |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
KL22 |
EIN-RE |
Drehrichtung rechts ein |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
KL23 |
STO-A |
STO-A nach DIN61800-5-2 |
<2,0VDC=STO-A; >4,5VDC-24V=FU-Ein |
|
KL24 |
STO-B |
STO-B nach DIN61800-5-2 |
<2,0VDC=STO-B; >4,5VDC-24V=FU-Ein |
|
KL25* |
P0 |
Digital-Parametersatzauswahl b0 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
KL26* |
P1 |
Digital-Parametersatzauswahl b1 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
KL27* |
P2 |
Digital-Parametersatzauswahl b2 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
KL31 |
Q1 |
Digital-Mehrfachfunktionsausgang 1 |
5-24VDC wie UOUT; max. 0,1A |
|
KL32 |
Q2 |
Digital-Mehrfachfunktionsausgang 2 |
5-24VDC wie UOUT; max. 0,1A |
|
KL33 |
Q3 |
Digital-Mehrfachfunktionsausgang 3 |
5-24VDC wie UOUT; max. 0,1A |
|
KL34 |
Q4 |
Digital-Mehrfachfunktionsausgang 4 |
5-24VDC wie UOUT; max. 0,1A |
|
KL35* |
SAL |
Digital-Sammelalarmausgang |
5-24VDC wie UOUT; max. 0,1A |
|
KL36* |
QX |
Digital-Sonderfunktion |
5-24VDC wie UOUT; max. 0,1A |
|
KL37 |
UOUT |
Spannung für Funktionsausgänge |
5-24VDC ext.; 5VDC oder 24V int. |
* für FU0 (smart-version) standardmäßig nicht vorhanden
Standardmäßige Klemmenausführung: Schraubklemme, optional steckbare Anschlussklemmen möglich.
Busbetriebsspannung externer Teilnehmer 3-24VDC aus externer Quelle. Optional interne Versorgung 5VDC oder 24VDC verwendbar.
Erweiterungsports
Kommunikation
|
NR. |
BEZ. |
FUNKTION |
EIGENSCHAFTEN |
|
CAN |
|
CAN open-style V2.0B - 1Mbit/s |
Fernführung und Regelprozesse |
|
P1 |
0V GND |
Molex-Stiftleiste; 5pol; RM2,54 |
0V GND |
|
P2 |
CAN l |
Molex-Stiftleiste; 5pol; RM2,54 |
CAN-L |
|
P3 |
0V SH |
Molex-Stiftleiste; 5pol; RM2,54 |
0V shield |
|
P4 |
SAN H |
Molex-Stiftleiste; 5pol; RM2,54 |
CAN-H |
|
P5 |
(5V) |
Molex-Stiftleiste; 5pol; RM2,54 |
nicht belegt; optional 5VDC oder 24V int. |
|
USB |
|
USB2.0 - Device, full-speed |
|
|
ETH* |
|
Ethernet IEEE 802.3 10/100MHz |
|
|
NR. |
BEZ. |
FUNKTION |
EIGENSCHAFTEN |
|
OPT1 |
|
Kragenstiftleiste; 10pol; RM2,53 |
diverse Regelprozesse |
|
P1 |
0V |
Bezugsspannung |
0V GND |
|
P2 |
FPWM |
digitaler Drehzahlausgang; 1/U |
100%PWM = FE = 5-24VDC wie UOUT; max 0,1A |
|
P3 |
IPWM |
digitaler Motorstromausgang; %/100ms |
100%PWM = 200%I = 5-24VDC wie UOUT; max 0,1A |
|
P4 |
FAN |
analoger Drehzahlausgang; 0-Vscale |
Vscale = FE = 5V/10V/20V (parametrierbar) |
|
P5 |
FAN |
analoger Motorstromausgang; 0-Vscale |
Vscale = 200%I = 5V/10V/20V (parametrierbar) |
|
P6 |
0V |
Bezugsspannung |
0V GND |
|
P6 |
BRCP |
Brems-Chopper |
Treiberausgang |
|
P7 |
HALL-A |
Hall-Sensor; Eingang A |
Drehwinkelrückführung U |
|
P8 |
HALL-B |
Hall-Sensor; Eingang B |
Drehwinkelrückführung V |
|
P9 |
HALL-I |
Hall-Sensor; Eingang I |
Drehwinkelrückführung W |
|
P10 |
5VDC |
Sensorspannung |
5VDC |
|
P11 |
ENCA- |
Quadratur-Encoder |
U- |
|
P12 |
ENCA+ |
Quadratur-Encoder |
U+ |
|
P13 |
ENCB- |
Quadratur-Encoder |
V- |
|
P14 |
ENCB+ |
Quadratur-Encoder |
V+ |
|
P15 |
ENCI- |
Quadratur-Encoder |
W- |
|
P16 |
ENCI+ |
Quadratur-Encoder |
W+ |
|
P17 |
P0 |
Digital-Parametersatzauswahl b0 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
P18 |
P1 |
Digital-Parametersatzauswahl b1 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
P19 |
P2 |
Digital-Parametersatzauswahl b2 |
<1,5VDC=Aus; >3,0VDC-24V=Ein |
|
P20 |
24VDC |
Interne Versorgungsspannung |
24VDC |
|
(Markierte Pins nur bei FU0 vorhanden, für FU1-FU4 zusätzlich Erweiterungsports 2 und 3) |
|||
|
OPT2* |
|
Kragenstiftleiste; 16pol; RM2,53 |
Drehwinkel- und Drehzahlrückführung |
|
P1 |
0V |
Bezugsspannung |
0V GND |
|
P2 |
0V |
Bezugsspannung |
0V GND |
|
P3 |
ENCA- |
Quadratur-Encoder |
U- |
|
P4 |
ENCA+ |
Quadratur-Encoder |
U+ |
|
P5 |
ENCB- |
Quadratur-Encoder |
V- |
|
P6 |
ENCB+ |
Quadratur-Encoder |
V+ |
|
P7 |
ENCI- |
Quadratur-Encoder |
W- |
|
P8 |
ENCI+ |
Quadratur-Encoder |
W+ |
|
P9 |
5VDC |
Sensorspannung |
5VDC |
|
P10 |
5VDC |
Sensorspannung |
5VDC |
|
P11 |
COSA |
Resolver |
IN cos A |
|
P12 |
COSB |
Resolver |
IN cos B |
|
P13 |
SINA |
Resolver |
IN sin A |
|
P14 |
SINB |
Resolver |
IN sin B |
|
P15 |
PRIMA |
Resolver |
OUT prim A (15V) |
|
P16 |
PRIMB |
Resolver |
OUT prim B (15V) |
|
OPT3* |
|
internes Resolver-Aufsteckmodul |
|
* für FU0 (smart-version) standardmäßig nicht vorhanden
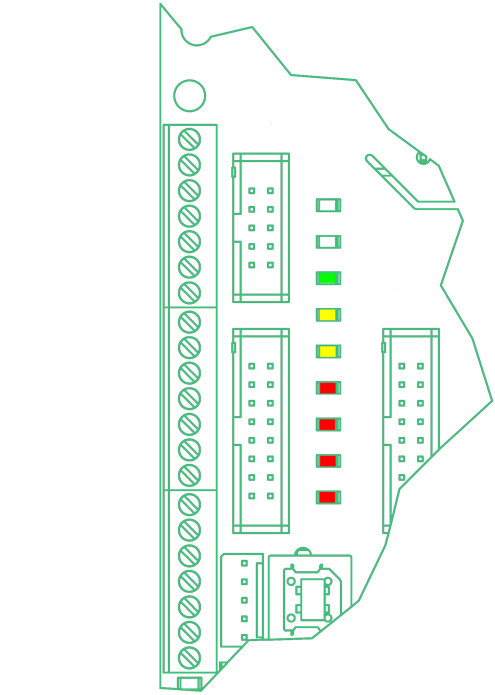
Leuchtindikatoren
Betriebszustände
|
NR. |
BEZ. |
FUNKTION |
EIGENSCHAFTEN |
|
LED40-WS* |
3.3VBS |
Betriebsspannung 3,3VDC vorhanden |
|
|
LED30-WS |
5VBS |
Betriebsspannung 5VDC vorhanden |
|
|
LED2-GN* |
CP |
Bremschopper aktiv |
kundenspezifisch |
|
LED3-GE |
UMN |
Unterspannung |
kundenspezifisch |
|
LED4-GE |
IGR |
Stromgrenze erreicht |
kundenspezifisch |
|
LED5-RT |
UMX |
Überspannung |
kundenspezifisch |
|
LED6-RT |
IK |
Fehlerstrom |
kundenspezifisch |
|
LED7-RT |
TMP |
Übertemperatur |
kundenspezifisch |
|
LED8-RT |
SAL |
Sammelalarm |
Klammerung aller Einzelalarme |
* für FU0 (smart-version) standardmäßig nicht vorhanden
Beispielverschaltungen
Achten Sie bei der Anschlussverdrahtung auf elektromagnetische Verträglichkeit wie zum Beispiel
Vermeidung von Erdschleifen, Verwendung geschirmter Motorleitungen und einen möglichst kurzen sternförmigen Anschluss aller Masseverbindungen.
Ansteuerung FU2
Drehwinkelrückführung und Betriebsanzeigen FU2